Integrantes del grupo:
Andrey Sebastián Alarcón Medina - 48877
Sebastian Ardila Penagos - 51919
Michael Chacon Poveda - 52351
Brayan Nicolás Galindo Moreno - 52000
Camilo Andres Romero Pinzón - 50826
Diana Lorena Páez Rodríguez - 52303
FUNDAMENTO HISTORICO


DEFINICION FORMAL

La manipulación de piezas llevada
a cabo por un robot implica el movimiento espacial de su extremo. Así mismo,
para que el robot pueda recoger una pieza es necesario conocer la posición y
orientación de ésta con respecto a la base del robot.
Se
aprecia entonces la necesidad de contar con una serie de herramientas
matemáticas que permitan especificar la posición y orientación en el espacio de
piezas, herramientas y, en general, de cualquier objeto.
Estas
herramientas han de ser lo suficientemente potentes para permitir obtener de
forma sencilla relaciones espaciales entre distintos objetos y en especial entre
éstos y el manipulador.
Configuraciones
morfológicas y parámetros característicos de los robots industriales
Según la geometría de su estructura mecánica, un manipulador puede
ser:
- Cartesiano, cuyo posicionamiento en el espacio se lleva a cabo mediante articulaciones lineales.
- Cilíndrico, con una articulación rotacional sobre una base y articulaciones lineales para el movimiento en altura y en radio.
- Polar, que cuenta con dos articulaciones rotacionales y una lineal.
- Esférico (o de brazo articulado), compuestos por tres articulaciones rotacionales.

Sistema
cartesiano de referencia
Normalmente los
sistemas de referencia se definen mediante ejes perpendiculares entre sí con un
origen definido. Estos se denominan sistemas cartesianos, y en el caso de
trabajar en el plano (2 dimensiones), el sistema de referencia OXY
correspondiente queda definido por dos vectores coordenados OX y OY perpendiculares
entre sí con un punto de intersección común O.

Sistema
cartesiano de referencia
Si se trabaja en el
espacio (3 dimensiones), el sistema cartesiano OXYZ está compuesto por una
terna ortonormal de vectores coordenados OX, OY y OZ, tal y como se ve en la
siguiente figura.
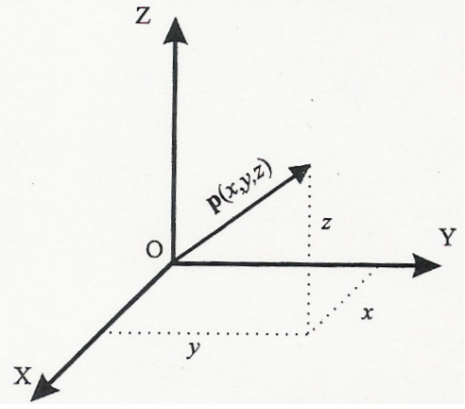
Coordenadas
cartesianas
Si se trabaja en un plano, con su
sistema coordenado OXY de referencia asociado, un punto a vendrá expresados por
las componentes (x,y) correspondientes a los ejes coordenados del sistema OXY.
Este punto tiene asociado un vector p(x,y),
que va desde el origen O del sistema OXY hasta el punto a. Por tanto, la
posición del extremo del vector p
está caracterizado por las dos componentes (x,y), denominadas coordenadas
cartesianas del vector y que son las proyecciones del vector p sobre los ejes OX y OY.
Coordenadas
polares y cilíndricas
Para un plano es posible también
caracterizar la localización de un punto o vector p respecto a un sistema de ejes cartesianos de referencia OXY
utilizando las denominadas coordenadas polares p(r,θ). En esta representación, r representa la distancia desde el
origen O del sistema hasta el extremo del vector p, mientras que θ es el ángulo que forma el vector p con el eje OX.

Coordenadas
polares y cilíndricas
En el caso de trabajar en tres
dimensiones, un vector p podrá
expresarse con respecto a un sistema de referencia OXYZ, mediante las
coordenadas cilíndricas p(r,θ,z).
Las componentes r y θ tienen el mismo significado que en caso de las
coordenadas polares, mientras que la componente z expresa la proyección sobre
el eje OZ del vector p.

Coordenadas
esféricas
También es posible utilizar
coordenadas esféricas para realizar la localización de un vector en un espacio
de tres dimensiones. Utilizando el sistema de referencia OXYZ, el vector p tendrá como coordenadas esféricas
(r,θ,φ), donde la componente r es la distancia desde el origen O hasta el
extremo del vector p; la θ
componente es el ángulo formado por la proyección del vector p sobre el plano OXY con el eje OX y la
componente φ es el ángulo formado por el vector p con el eje OZ.

Método de
conversiones



EJEMPLOS


APLICACION
Teniendo en cuenta que realizando el analisis del posicionamiento espacial de un robot se puede llegar a determinar los puntos de alcance maximo y minimo del mismo, nos facilita la comprension de su espacio de trabajo.
El espacio de trabajo de un robot hace referencia, valga la redundancia, al espacio en el cual este podra realizar su desplazamiento. Tener conocimiento de esto es sumamente importante en la industria debido a que a la hora de realizar la instalación de un robot industrial, es necesario adecuar su entorno a este, es decir, se debe hacer un estudio previo en el cual se asegure de que ningún elemento externo vaya a interrumpir la movilidad del robot y en caso de haberlo, es necesario retirarlo para así evitar posibles daños tanto en el robot, como en los procesos que este esta participando.
Adicionalmente a lo previamente mencionado, el calculo y análisis de la posición espacial también nos brinda la información necesaria para elaborar la programación de los movimientos que el robot tendrá que desarrollar brindando así la posibilidad de agudizar la precisión de dichos movimientos.
APORTES
Para
observar más a fondo la importancia que tiene el cálculo vectorial en el
posicionamiento espacial, se hará uso de el para determinar la posición final
de un robot industrial muy conocido, el FANUC s420f, donde tendremos una
posición y a partir de la medida entre el elemento terminal y la base de este
junto con las medidas de sus eslabones ubicaremos la posición final del robot:
- Se toma la medida de la base del robot empleando un flexómetro, al extremo del elemento terminal para determinar asi el radio del vector final.
- Se toma la altura desde la base del primer eslabon hasta la punta del elemento terminal, ya que esta será la coordenada en Z para determinar la distancia que hay entre el elemento terminal y el suelo.
- Se toma la medida de los angulos de cada uno de los elabones para asi definir su posicion final.
- Ya que las medidas se toman en coordenadas cilindricas, se aplica la conversion a coordenadas rectangulares para graficar con mayor facilidad.
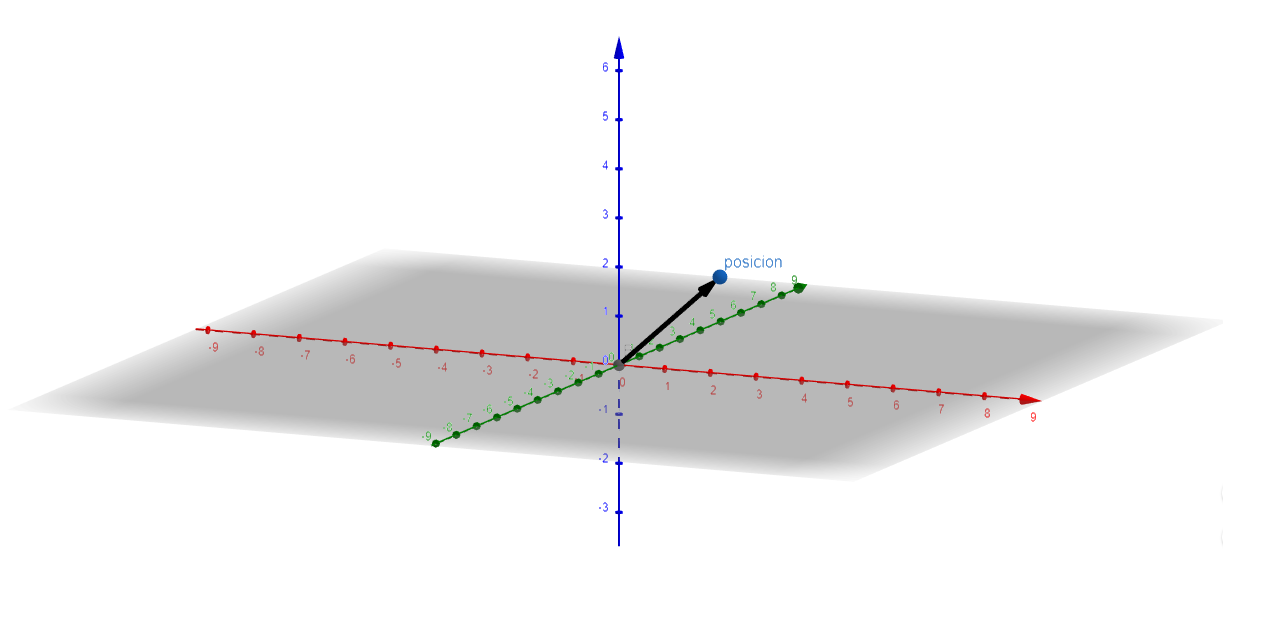
Ejemplo aporte:

- Se toma la medida desde la base hasta la punta del elemento terminal lo cual nos da 1,97m (197cm), y desde este punto la altura es de 2.81m (281cm). El angulo de todos los eslabones con respecto a su marco de coordenadas es 0 ya que se encuentra en una posicion de reposo.
- Ahora, procedemos a realizar las respectivas conversiones de coordenadas.

- La grafica queda de la siguiente manera.

Bibliografía
http://fisica-mecatronica.net/robotica1/2a-Herramientas-localizacion-espacial.pdf
http://platea.pntic.mec.es/vgonzale/cyr_0708/archivos/_15/Tema_5.4.htm
http://www.udesantiagovirtual.cl/moodle2/mod/book/tool/print/index.php?id=24899
https://evolucioninformatica.wordpress.com/2011/05/29/historia-de-la-robotica/
https://evolucioninformatica.wordpress.com/2011/05/29/historia-de-la-robotica/
ROBÓTICA control de robots manipuladores - Fernando Reyes Cortés
Comentarios
Publicar un comentario